

-
 LGN-03C型 PLC可编程控制器实验装置、PLC可编程控制器实验设备、PLC可编程控制器实验系统
¥8900.00
LGN-03C型 PLC可编程控制器实验装置、PLC可编程控制器实验设备、PLC可编程控制器实验系统
¥8900.00 -
 定制LGJ-SZ02型 光机电一体化双轴位置控制实训装置、 光机电一体化双轴位置控制实训设备、光机电一体实训系统
¥8900.00
定制LGJ-SZ02型 光机电一体化双轴位置控制实训装置、 光机电一体化双轴位置控制实训设备、光机电一体实训系统
¥8900.00 -
 供应LG-IOR03型 六自由度机器人实训系统、六自由度机器人实训装置、六自由度机器人实训设备
¥9800.00
供应LG-IOR03型 六自由度机器人实训系统、六自由度机器人实训装置、六自由度机器人实训设备
¥9800.00 -
 预售LG-RAI02型 工业机器人与视觉实训平台、工业机器人与视觉实训装置、工业机器人与视觉实训设备
¥1.00万
预售LG-RAI02型 工业机器人与视觉实训平台、工业机器人与视觉实训装置、工业机器人与视觉实训设备
¥1.00万 -
 定制LG-XTP02型 通风排烟系统考核培训装置、通风排烟系统考核培训设备、通风排烟系统考核培训系统
¥8900.00
定制LG-XTP02型 通风排烟系统考核培训装置、通风排烟系统考核培训设备、通风排烟系统考核培训系统
¥8900.00
- 产品参数
- 图文介绍
- 企业简介
- 企业地址
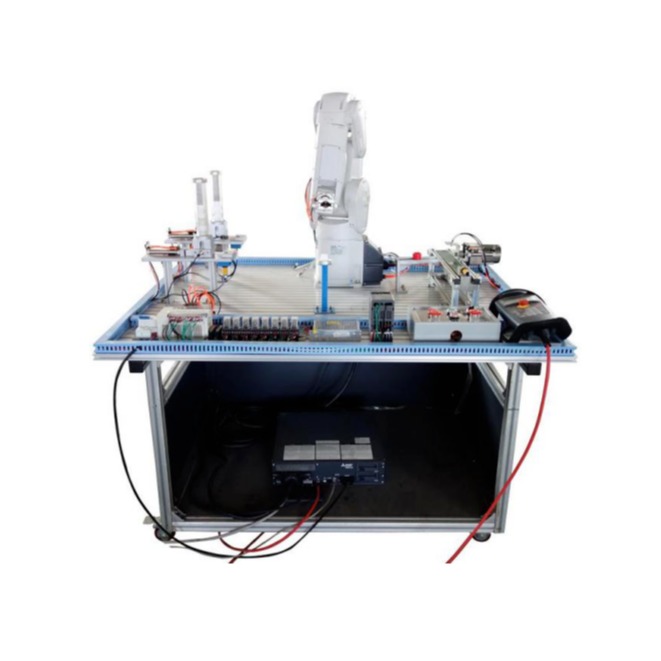
LG-JQR多功能焊接机器人实训设备
1006A-138
技术参数
名称 | 多用途机器人 | ||
类型 | 垂直关节6自由度 | ||
主要用途 | 焊接、搬运 | ||
规格(型号) | 1006A-138 | ||
可搬重量 | 6KG | ||
位置重复精度 | ±0.08mm | ||
电源容量 | 1.5KVA | ||
P点动作范围 | 见左图 | ||
本体重量 | 150KG | ||
动作范围 | 基本轴 | J1 | ±170° |
J2 | +178° -63° | ||
J3 | +130° -75° | ||
手臂轴 | J4 | ±150° | |
J5 | ±112° | ||
J6 | ±360°(注1) | ||
速度 | 基本轴 | J1 | 119°/S |
J2 | 136°/S | ||
J3 | 137°/S | ||
手臂轴 | J4 | 214°/S | |
J5 | 156°/S | ||
J6 | 346°/S | ||
安装方法 | 地面 | ||
使用环境条件 | 0-45℃,20-80%RH 无结露 | ||
防护等级 | 与IP67相当 | ||

工作范围

1006A-144
名称 | 多用途机器人 | ||
类型 | 垂直关节6自由度 | ||
主要用途 | 焊接、搬运 | ||
规格(型号) | 1006A-144 | ||
可搬重量 | 6KG | ||
位置重复精度 | ±0.08mm | ||
电源容量 | 1.7KVA | ||
P点动作范围 | 见左图 | ||
本体重量 | 170KG | ||
动作范围 | 基本轴 | J1 | ±170° |
J2 | +155° -90° | ||
J3 | +68° -82° | ||
手臂轴 | J4 | ±150° | |
J5 | ±112° | ||
J6 | ±330°(注1) | ||
速度 | 基本轴 | J1 | 119°/S |
J2 | 136°/S | ||
J3 | 137°/S | ||
手臂轴 | J4 | 160°/S | |
J5 | 156°/S | ||
J6 | 346°/S | ||
安装方法 | 地面 | ||
使用环境条件 | 0-45℃,20-80%RH 无结露 | ||
防护等级 | 与IP67相当 | ||

工作范围

1006A-180
名称 | 多用途机器人 | ||
类型 | 垂直关节6自由度 | ||
主要用途 | 焊接、搬运 | ||
规格(型号) | 1006A-180 | ||
可搬重量 | 6KG | ||
位置重复精度 | ±0.08mm | ||
电源容量 | 3.7KVA | ||
P点动作范围 | 见左图 | ||
本体重量 | 210KG | ||
动作范围 | 基本轴 | J1 | ±170° |
J2 | +90° -85° | ||
J3 | +80° -90° | ||
手臂轴 | J4 | ±170° | |
J5 | +125° -90° | ||
J6 | ±220° | ||
速度 | 基本轴 | J1 | 136°/S |
J2 | 135°/S | ||
J3 | 125°/S | ||
手臂轴 | J4 | 150°/S | |
J5 | 150°/S | ||
J6 | 333°/S | ||
安装方法 | 地面 | ||
使用环境条件 | 0-45℃,20-80%RH 无结露 | ||
防护等级 | 与IP67相当 | ||

工作范围


-

-

-

-

-

-

-
 微机继电保护装置、微机继电保护设备、微机继电保护系统¥9800.00
微机继电保护装置、微机继电保护设备、微机继电保护系统¥9800.00 -






- 产品参数
- 图文介绍
- 企业简介
- 企业地址